Robotized quality control station
Robotized 3D scanning station was created for Mitsubishi Electric Polska as a proof-of-concept to verify market potential of such a system for reverse engineering or quality control.
The station was based on the robotic arm and rotating table with PLC controller, custom-built 3D structured light scanner and custom software. Positioning devices were used to move the scanner around the measured object, to provide full-surface coverage and proper (perpendicular) observation angle.
The idea behind the system was to popularize the use of advanced 3D imaging device in industrial applications. At that moment, there were exotic applications where depth-sensing cameras were used, but the accuracy of 3D data was not good enough for quality control nor for reverse engineering. Structured light scanner, on the other hand, offered very high accuracy and sampling density at the cost of much longer measurement time and higher cost of the device itself.
My role in the project: Software team leader, C++ developer, robot control expert
| Task | Description |
|---|---|
| Lead team of engineers developing software for robotic station | Coordinated the work of software development team with hardware / electronics team. Developed the architecture of the software modules and applications. Reviewed the code and helped to develop modules. |
| Implemented software for controlling robot movement with collision-avoidance algorithms | Movement of the robot (with mounted scanner head), object (on rotating table) within the working volume was controlled from the software module I authored. It contained inverse-kinematics algorithms, 3D volume representation and advanced collision-avoidance algorithms. Inverse kinematics was used to calculate the spatial configuration of the table and all robot joints needed to place the scanner head in required position. |
| Implemented 3D data processing algorithms | Raw measurements from structured light scanner (2.5D data) had to be processed and fit into the 3D model being acquired. The algorithms used for that was based on the kinematic-chain (table-robot-scanner) information as well as future-based Iterative-closest-point method. |

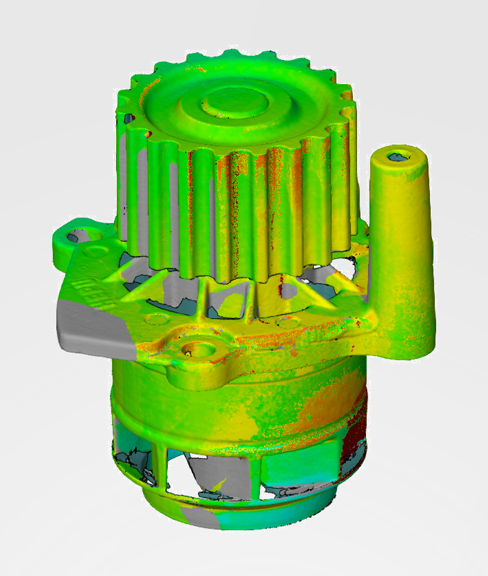

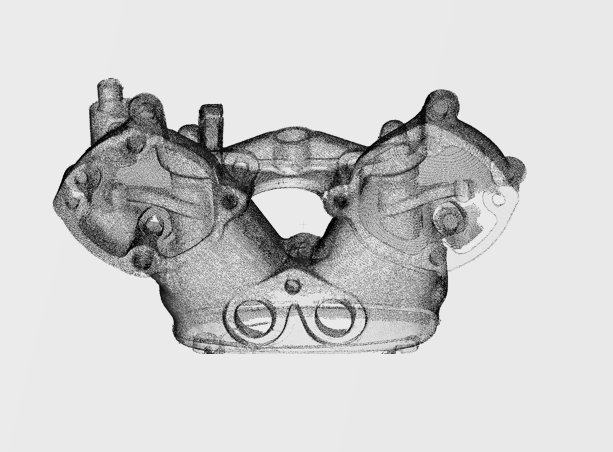
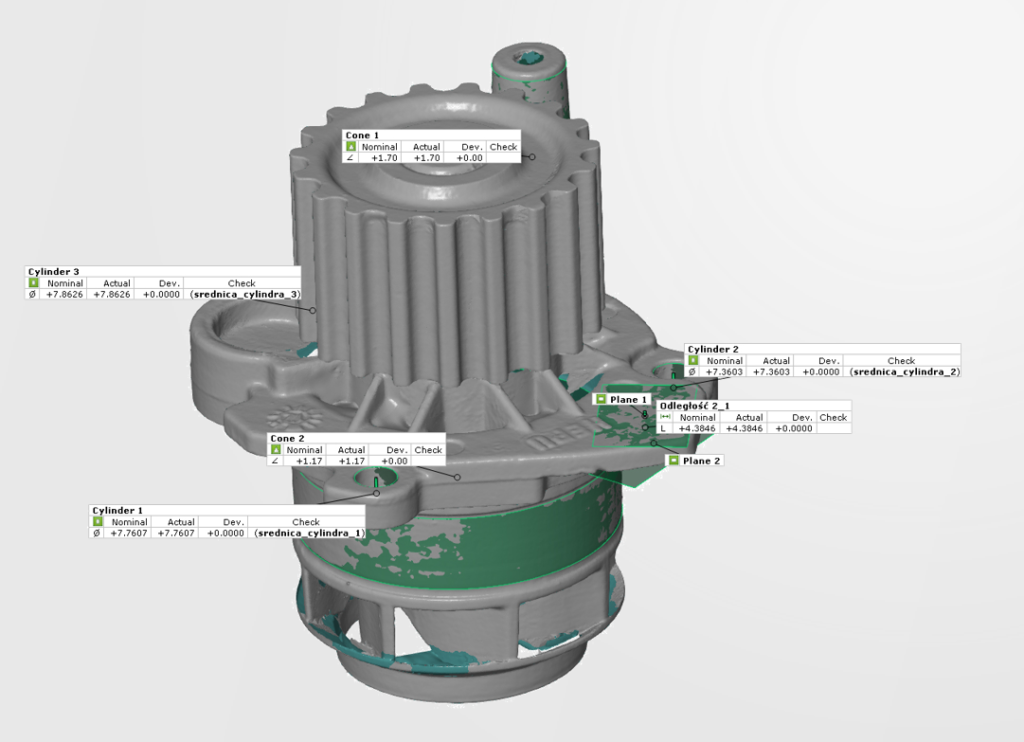
Exemplary screenshots of measured automotive parts
The system offered a fully automated 3D model creation of an unknown object. Exemplary triangle mesh obtained for an oil pan is available here: